Für die Konstruktion der Stromortskurve wird das Ersatzschaltbild aus dem letzten Beitrag erneut aufgegriffen.
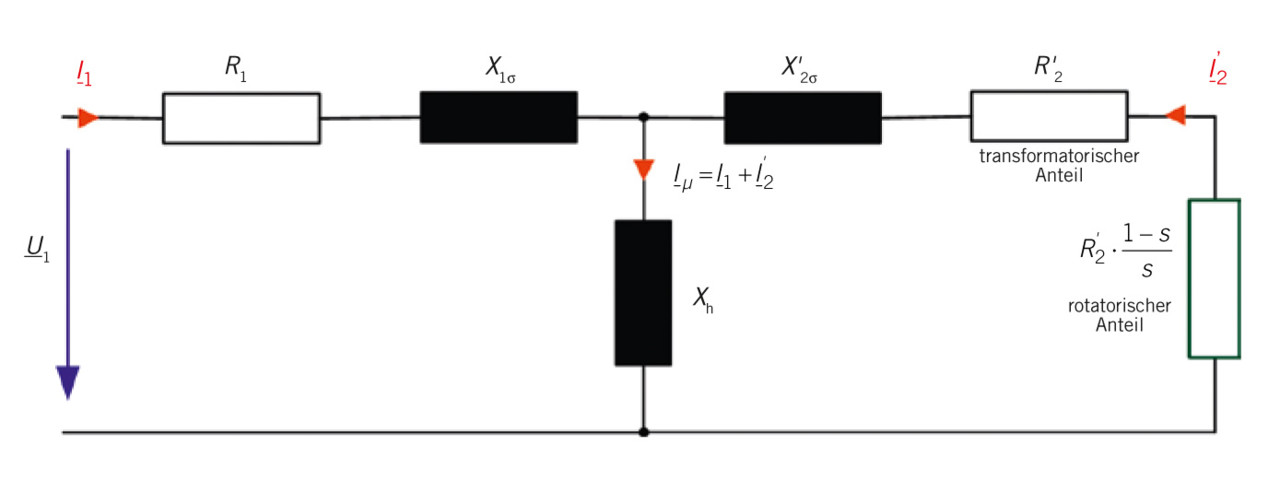
Ersatzschaltbild der Asynchronmaschine
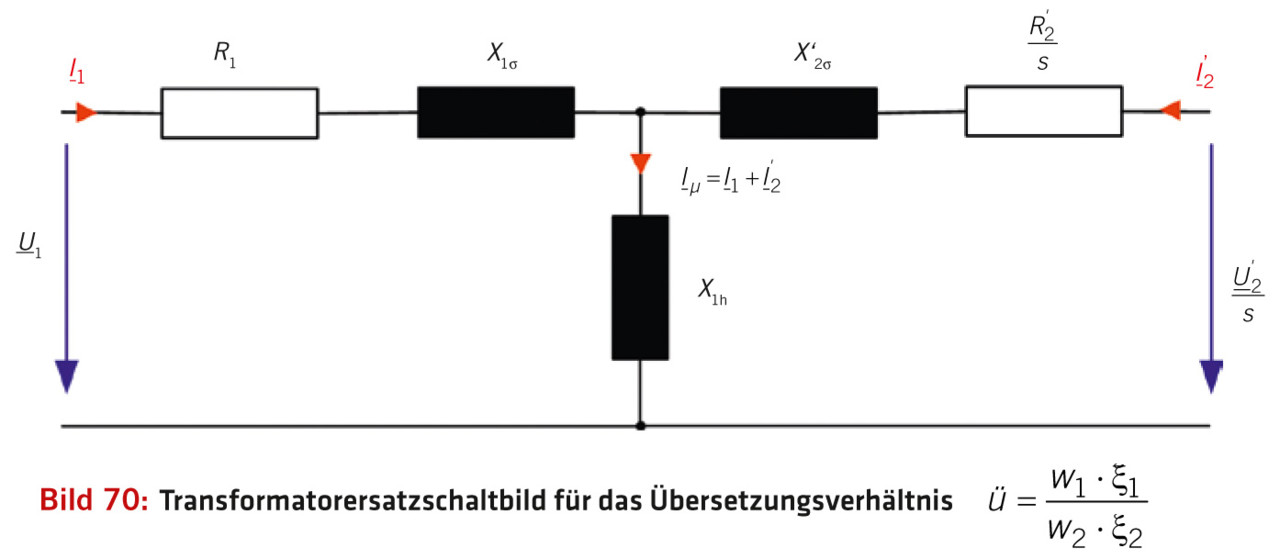
Für die Ständer- und die Läuferspannungsgleichung ergeben sich die folgenden mathematischen Beschreibungen:

Die Ständerspannung U1 setzt sich aus dem Spannungsabfall am Ständerwiderstand R1, dem Spannungsabfall an der Streuinduktivität L1σ sowie dem Spannungsabfall über der Hauptinduktivität L1h zusammen. Die Rückwirkung des Läuferkreises wird durch den auf die Ständerseite transformierten Rotorstrom I’2 repräsentiert.
Die Läuferspannung U’2/s ist die Summe der Spannungsabfälle über dem schlupfabhängigen Läuferwiderstand R’2/s, den Spannungsabfällen über der Läuferstreureaktanz und der Hauptreaktanz. Die Kopplung zum Ständerkreis erfolgt mithilfe des Stroms I2.
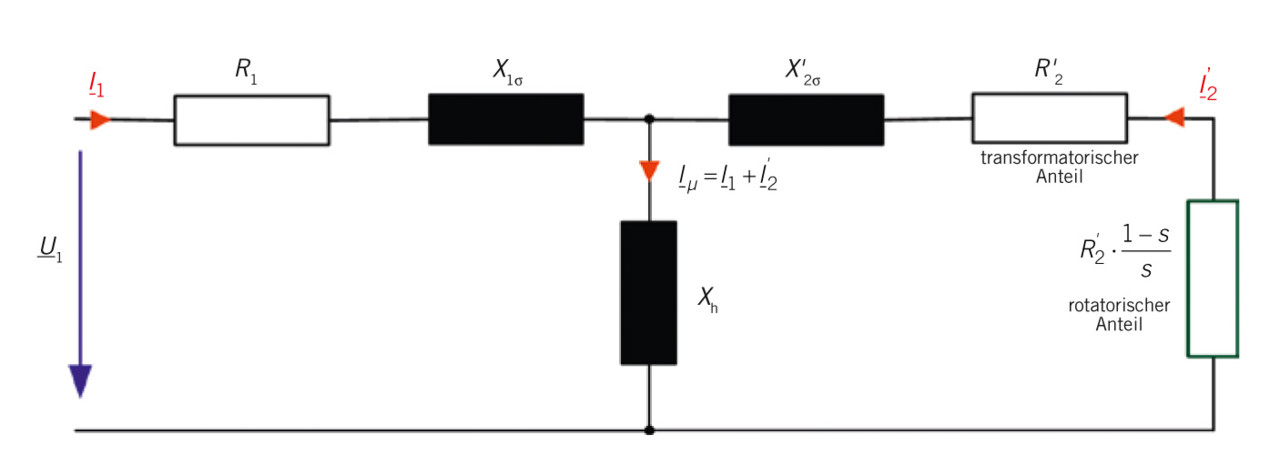
In Bild 70 ist das entsprechende T-Ersatzschaltbild dargestellt. Der schlupfabhängige Läuferwiderstand wird in einen transformatorischen und einen rotatorischen Anteil nach Gl. 3 zerlegt:
Somit ergibt sich für den kurzgeschlossenen Läufer und den transformatorischen und rotatorischen Läuferwiderstand das Ersatzschaltbild in Bild 71.
Inneres Drehmoment
Anhand des Ersatzschaltbildes lässt sich der Asynchronmaschinenanlauf aus dem Stillstand wie folgt beschreiben. Ist die Läuferwicklung kurzgeschlossen (Bild 71), induziert das Ständerdrehfeld in der noch stehenden Läuferwicklung eine Spannung. Es fließt der Läuferstrom I2. Die Wechselwirkung zwischen dem Läuferstrom I2 und der magnetischen Flussdichte B des Ständerfeldes führt nach Gl. 4 zu einer an der Läuferoberfläche tangential angreifenden Kraft F:
Ist der Läufer der Asynchronmaschine drehbar gelagert, ergibt sich aus dem Läuferradius das innere Drehmoment der Maschine. Der Rotor läuft in Drehfeldrichtung an und beschleunigt, bis das elektrisch entwickelte Drehmoment dem Lastmoment entspricht.Beim Hochlauf des Läufers nimmt die Frequenz des Läuferstroms f2 mit zunehmender Drehzahl n ab. Da die induzierte Spannung von der Frequenz f2 abhängig ist, nimmt diese ebenfalls ab. Die Läuferstromfrequenz ergibt sich aus der speisenden Ständerfrequenz f1 – reduziert um die auf das elektrische Bezugssystem bezogene Drehzahl (Polpaarzahl-Drehzahl).
Der relative Unterschied zwischen der Drehfeldfrequenz und der Motordrehzahl - bezogen auf die ideelle Leerlaufdrehzahl n0 - wird als »Schlupf« der Maschine bezeichnet.
Für die Drehzahl ergibt sich aus Gl. 6
und für die Läuferstromfrequenz aus Gl. 5 und Gl. 7
Steht die Maschine, ist die Drehzahl n = 0 und der Schlupf ergibt nach Gl. 6 den Wert »1«. Der Spannungsabfall am rotatorischen Anteil des Läuferwiderstands im Ersatzschaltbild wird null. Es wirkt ausschließlich der transformatorische vom Schlupf unabhängige Läuferwiderstand. Beschleunigt die Maschine aus dem Stillstand, so sinkt der Schlupf. Unter Vernachlässigung der mechanischen Reibung stellt sich der ideelle Leerlauf ein.
Idealer Leerlauf
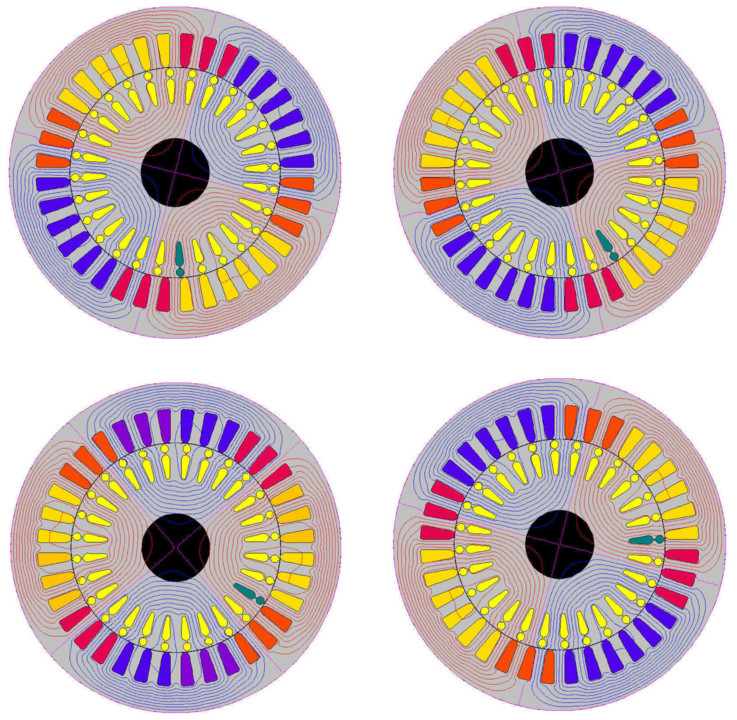
Dreht sich der Läufer mit der idealen Leerlaufdrehzahl n0, sind die Läuferdrehzahl und die Drehfeldfrequenz identisch. Die Maschine läuft synchron (s = 0). Der rotatorische Anteil des Läuferwiderstandes wird unendlich groß und somit der Läuferstrom gleich null. Es wird keine Spannung in die kurzgeschlossene Läuferwicklung induziert. Das Ständerdrehfeld und der Läufer haben die gleiche Winkelgeschwindigkeit.
In Bild 72 ist zu erkennen, dass der Läufer und das magnetische Feld relativ zueinander ruhen. Zur Orientierung wurde ein Läuferstab grün eingefärbt. Das Feld rotiert um denselben Winkel wie der markierte Läuferstab. Wird keine Spannung in die Läuferwicklung induziert, fließt auch kein Läuferstrom und das Drehmoment ist gleich null. Dieser Betriebszustand wird »idealer Leerlauf« genannt. Die Asynchronmaschine nimmt zur Deckung ihres Blindleistungsbedarfs ausschließlich den Magnetisierungsstrom Iμ auf. Da der Läuferstrom null ist ergibt sich auch keine Rückwirkung vom Läufer auf den Ständer. Dies ist auch deutlich an weiteren unverzerrten Feldbildern zu erkennen.
Belastung der Asynchronmaschine
Wird die Maschine belastet, sinkt die Drehzahl. Das magnetische Drehfeld überstreicht die Läuferspule und induziert die Läuferspannung. In der kurzgeschlossenen Läuferspule fließt ein von der Belastung der Maschine abhängiger Läuferstrom I2. Dieser Läuferstrom baut ebenfalls ein magnetisches Feld auf, das das Ständerfeld überlagert und zu einer Gesamtfeldverzerrung führt.
Stromortskurve
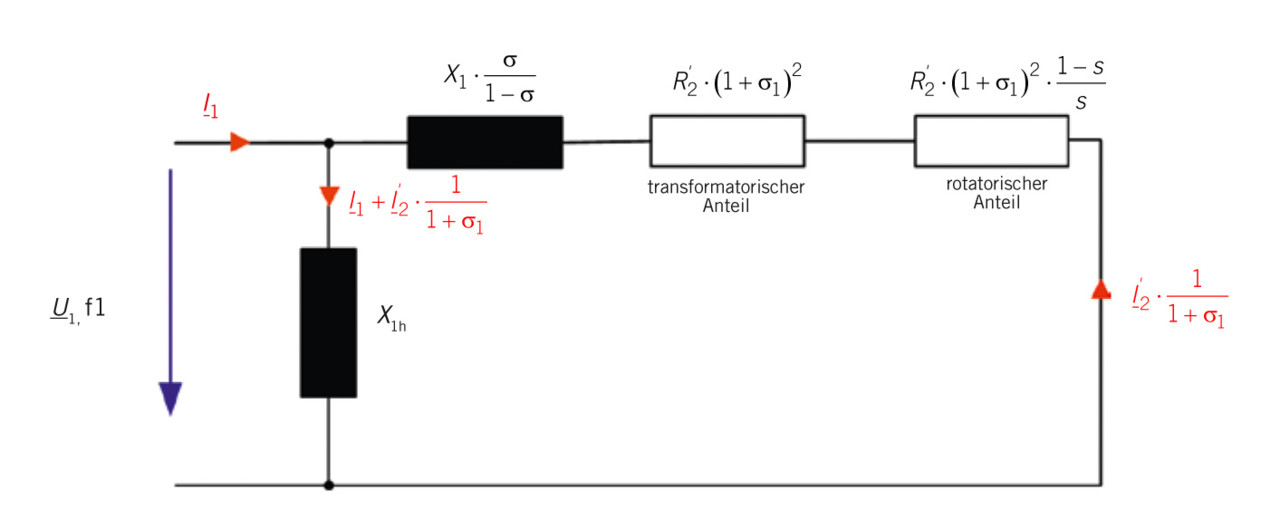
Für die Konstruktion der Stromortskurve wird das Ersatzschaltbild in ein äquivalentes Ersatzschaltbild nach Bild 73 umgewandelt. Dabei wird vorerst der Ständerwiderstand (R1 = 0) vernachlässigt. Aus Gl. 1 ergibt sich:
Die Induktivität X1 setzt sich aus der Summe der Hauptinduktivität X1h und der Streuinduktivität X1σ zusammen:
Des Weiteren sind die Streuziffern σ1 und σ2, die sich aus dem Quotienten der Streuinduktivität und der Hauptinduktivität ergeben, zu definieren:
Die Gesamtstreuziffer kann durch die Einzelstreuziffern beschrieben werden:
Aus den beiden Gl. 11 und Gl. 12 ergibt sich für die Hauptinduktivität:
Wird die Gl. 15 in die Ständerspannungsgleichung (Gl. 10) integriert, folgt daraus
Auf dieselbe Art kann für den kurzgeschlossenen Läufer die Spannungsgleichung aus Gl. 2 umgeformt werden:
Aus den beiden Gl. 16 und Gl. 17 ergibt sich das neue Ersatzschaltbild der Asynchronmaschine in Bild 73. Die Streuinduktivität Xσ1 ist in der neuen Darstellung nicht mehr existent. Mit Hilfe des neuen Ersatzschaltbildes und seinen transformierten Induktivitäten und Widerständen lässt sich anschaulich die Stromortskurve der Asynchronmaschine konstruieren. Die Eigenschaften und der Existenzbeweis dieses Kreises wurden bereits in den Jahren 1895 bis 1900 von Heyland und Ossanna entwickelt. Daher wird die Stromortskurve auch als »Heyland-Kreis« bezeichnet.
Konstruktion der Stromortskurve
Der Strom I1 setzt sich aus der geometrischen Überlagerung des Leerlaufstroms und des Läuferstroms zusammen:
Der Leerlaufstrom I0 ergibt sich bei synchroner Drehzahl der Asynchronmaschine (s = 0). Wie aus Bild 73 ersichtlich wird, strebt der Rotorwiderstand für s = 0 gegen unendlich. Es fließt kein Rotorstrom. Die Spannung U1 liegt ausschließlich über dem induktiven Widerstand X1. Damit ergibt sich für den Leerlaufstrom:
Der schlupfabhängige Läuferstrom lässt sich aus der schlupfabhängigen Impedanz des Läuferkreises ermitteln. Die Spannung U1 fällt ebenfalls über der Reihenschaltung aus Induktivität und schlupfabhängigem Widerstand ab (Bild 74). Die Läuferimpedanz errechnet sich folgendermaßen:
Für den Läuferstrom ergibt sich aus der Multiplikation der Ständerspannung U1 mit Admittanz Y:
Die Stromortskurve kann mithilfe der Ortskurventheorie konstruiert werden. Der Betrag des Läuferstroms errechnet sich aus
und für den Winkel cosφ2 folgt:
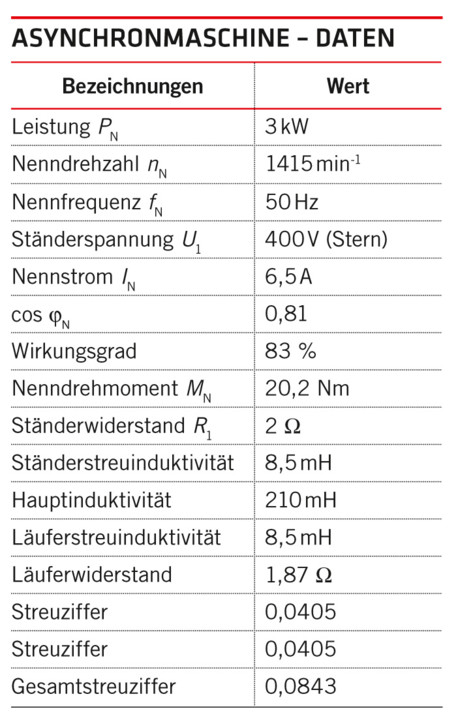
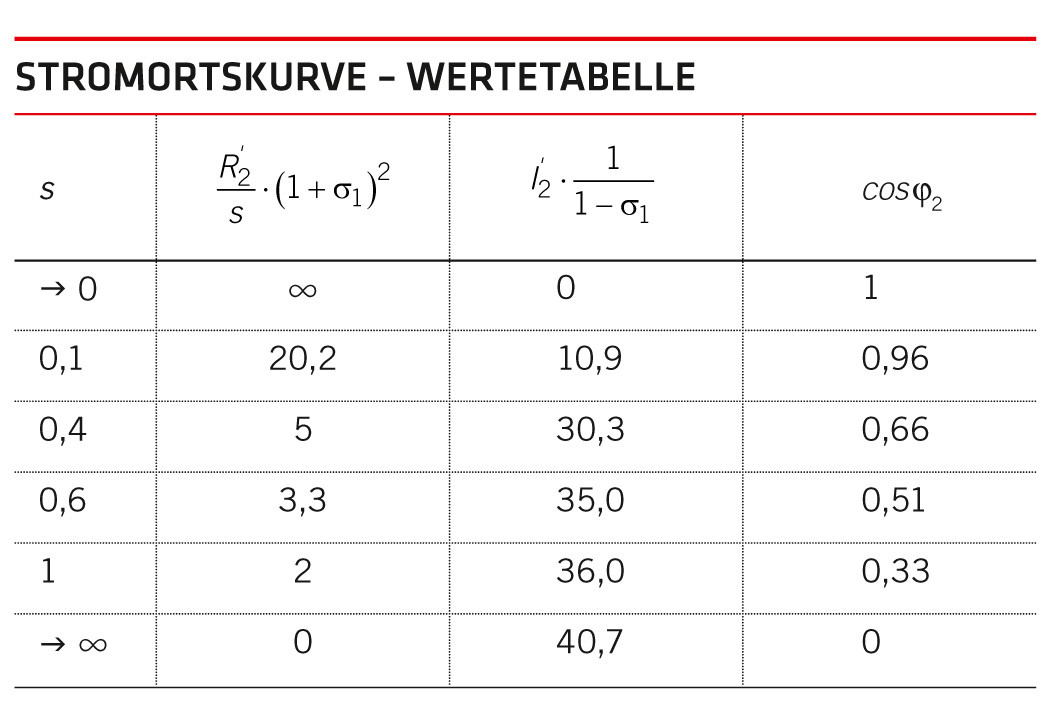
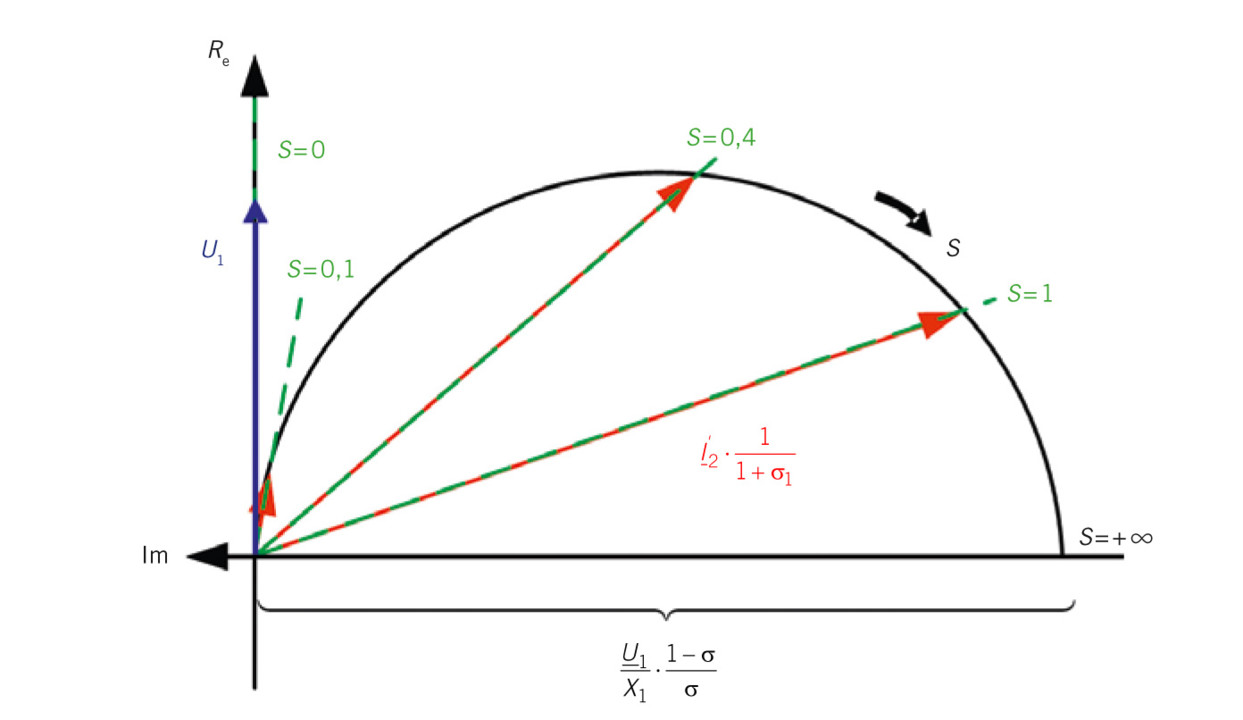
Zur Veranschaulichung wird anhand der Daten aus Tabelle 1 berechnet, wie sich der Läuferstrom in Abhängigkeit vom Schlupf verhält (Tabelle 2). Mit der Berechnung des Läuferstroms in Betrag und Phase lässt sich die Stromortskurve für die Reihenschaltung aus der schlupfabhängigen Läuferimpedanz gemäß Gl. 20 zeichnen. Es ergibt sich in Abhängigkeit vom Schlupf ein Halbkreis.
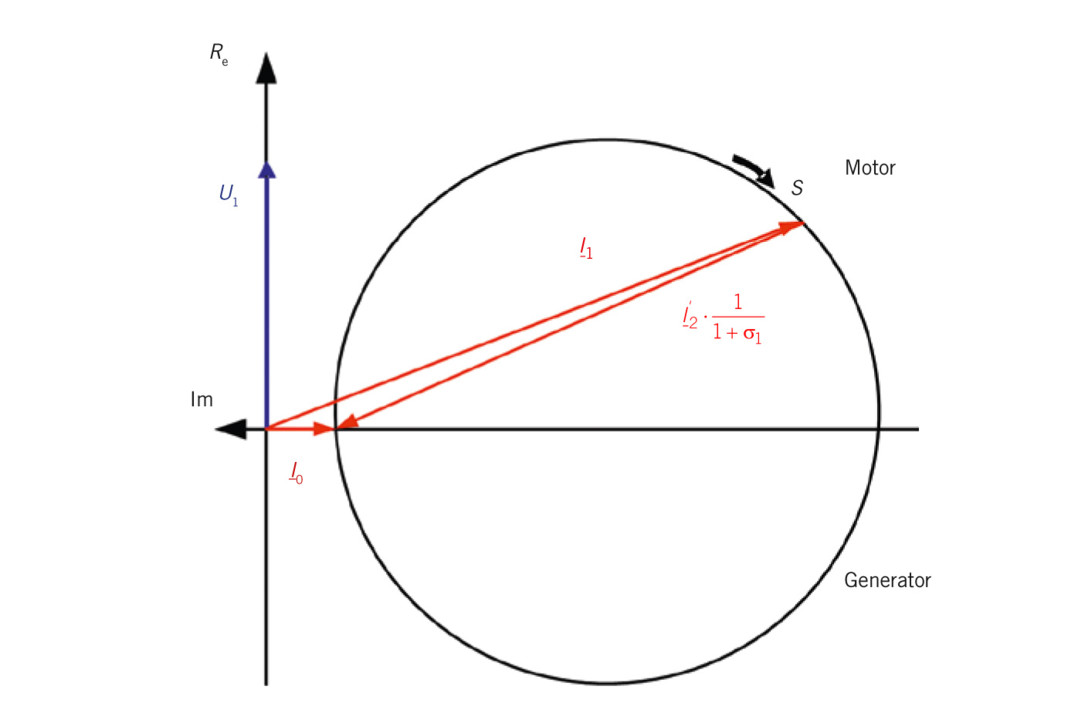
Für die Konstruktion der Ständerstromortskurve I1 muss dem Läuferstrom der Leerlaufstrom I0 laut Gl. 19 überlagert werden. Die Läuferstromortskurve wird um den Leerlaufstrom I0 verschoben (Bild 75). Ist der Realteil des Ständerstroms positiv, befindet sich die Maschine im Motorbetrieb. Ist der Realteil hingegen negativ, so wird die Maschine als Generator betrieben.
Aus der Überlagerung des transformierten Läuferstroms I2’ · 1/(1 + σ1) und des Leerlaufstroms I0 ergibt sich der schlupfabhängige Ständerstrom I1. Grafisch lässt sich der Ständerstrom in Form einer Stromortskurve (Bild 76) darstellen. Die Spitze des Ständerstromzeigers I1. beschreibt einen um den Leerlaufstrom verschobenen Kreis. Er setzt sich aus einem Wirkstrom I1W und einem Blindstrom I1B zusammen. Bei der Darstellung der Stromortskurve sind der Blindstrom auf der x-Achse (reelle Achse) und der Wirkstrom auf der y-Achse (imaginäre Achse) aufgetragen.
Je nach Belastung der Maschine ergibt sich für den stationären Arbeitspunkt eine Abweichung der Ist-Drehzahl n von der Leerlaufdrehzahl n0. Die von der Belastung abhängige relative Drehzahlabweichung drückt sich im Schlupf der Maschine aus. Somit stellt sich in Abhängigkeit von der Belastung eine neue Drehzahl bzw. ein neuer Schlupf ein.
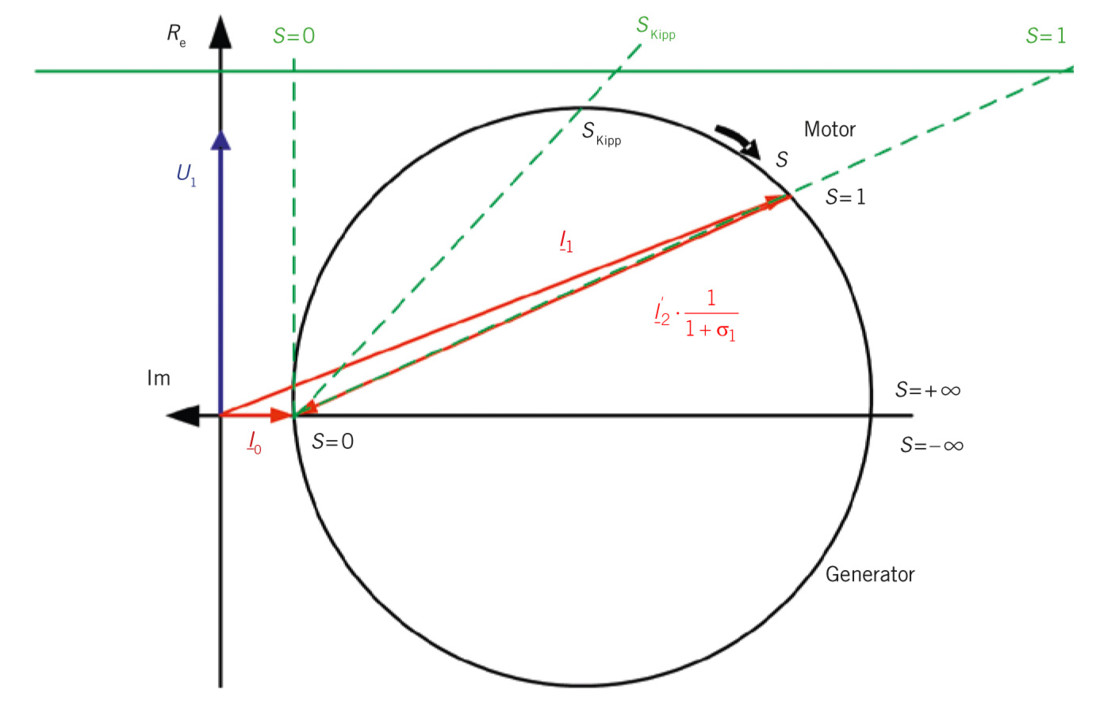
Wie in Bild 77 zu erkennen ist, verläuft die Parametrisierung der Stromortskurve mit dem Schlupf s nicht linear. Die Stromortskurve wird mithilfe der linear eingeteilten Schlupfgeraden parametrisiert. Zur linearen Einteilung der Schlupfgeraden werden mindestens zwei Betriebspunkte auf der Schlupfgeraden benötigt. Besonders geeignet sind hierbei der ideale Leerlaufpunkt (s = 0) und der ideale Kurzschlusspunkt (s = 1).
Nachdem in diesem Beitrag die Konstruktion der Stromortskurve eingeführt wurde, werden im nächsten Beitrag ausgewählte Betriebspunkte wie beispielsweise der Kipppunkt betrachtet.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}