
Zur Echtzeitfähigkeit hinzu kommt die hohe Synchronisationsgenauigkeit in einer Größenordnung von Nanosekunden. Dezentrale, intelligente Antriebe können davon profitieren, vor allem dann, wenn mehrere Achsen synchronisiert werden müssen. Deshalb sind jetzt auch die bewährten ECI-63 Innenläufermotoren aus dem modularen Antriebssystem von ebm-papst mit Ethercat-Schnittstelle verfügbar.

(Bild: ebm-papst)
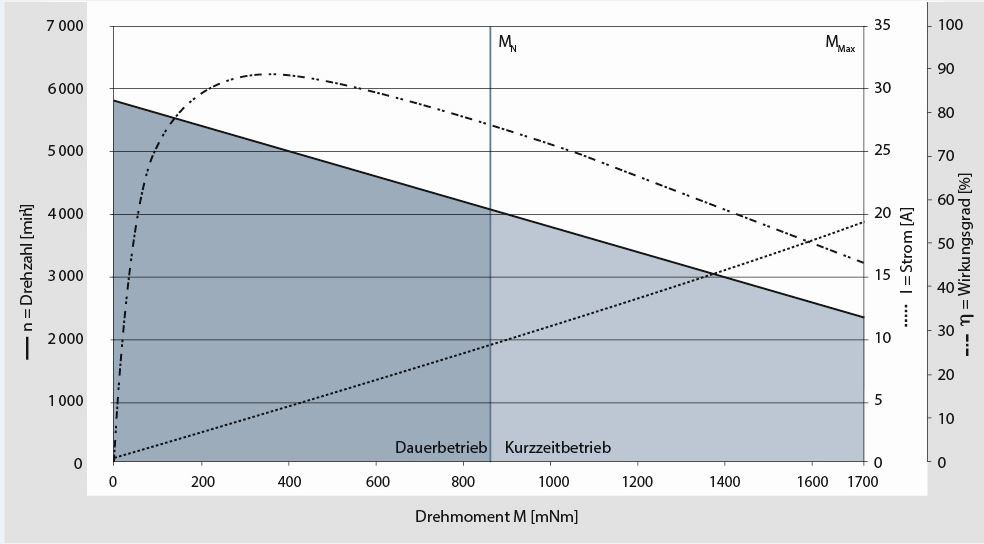
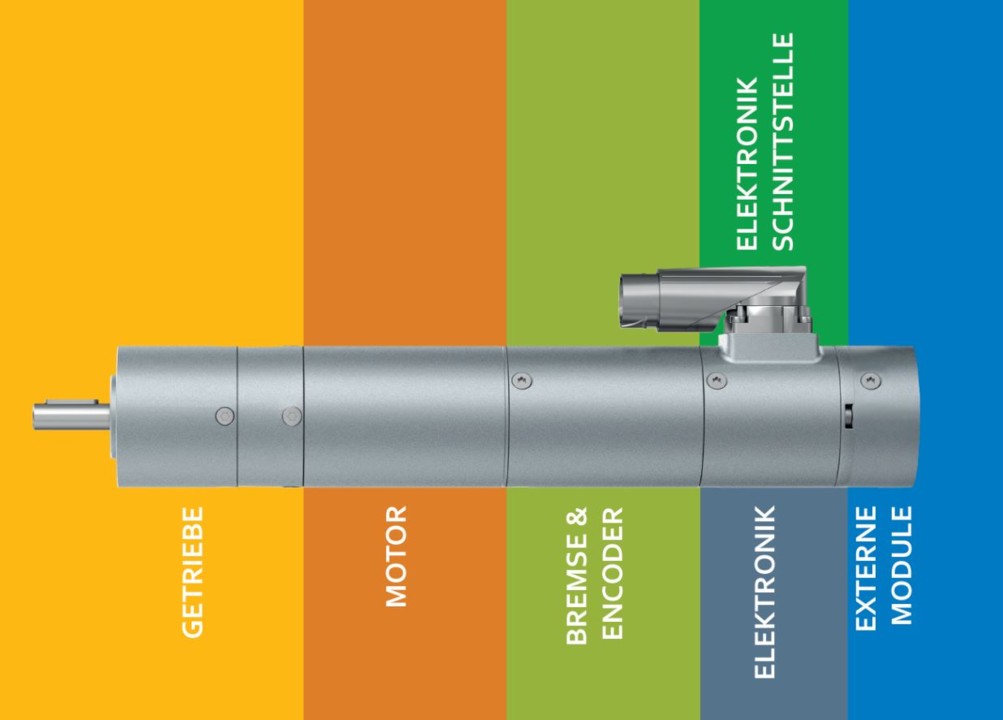
Antriebe sind in der Automatisierungstechnik selten Einzelkämpfer (Bild 1). Wenn es um die Koordination zahlreicher kleinerer Antriebe in einer Anlage geht, ist die früher übliche Trennung in Servomotor und abgesetzter, im Schaltschrank verbauter Motor-Regelung wenig sinnvoll. Praxisgerechter sind hier dezentrale Antriebs-lösungen mit im Motorgehäuse integrierter Elektronik. ebm-papst hat deshalb schon vor einiger Zeit die industriegerecht ausgelegten BLDC-Innenläuferantriebe der ECI-63 Baureihe (Bild 2), die bei Stator-Baulängen von 20 mm, 40 mm oder 60 mm Leistungen zwischen 150 W und 400 W abdecken (Bild 3), um das K5-Elektronik-Modul erweitert.
Integrierte Leistungselektronik
Die integrierte K5-Elektronik bietet zahlreiche feste und - ähnlich wie bei einer SPS - frei programmierbare Funktionen, sodass die Antriebe unabhängig von der übergeordneten Steuerung Programmabläufe selbstständig abarbeiten können. Um aktuellen und zukünftigen Marktanforderungen noch besser gerecht zu werden, wurden jetzt die Vernetzungsmöglichkeiten nochmals erweitert: Die Antriebe lassen sich nicht nur über die internen I/Os oder Canopen, sondern nun auch über eine Ethercat-Schnittstelle ansprechen. Dazu wurde im Elektronikmodul zusätzlich zur Leistungselektronik eine weitere Platine mit einer performanten Schnittstellenelektronik inklusive Multiprotokoll-Chip untergebracht. Hinsichtlich Ausprägung des Protokolls wird der weit verbreitete Standard CoE (Can over Ethercat) nach dem Antriebsprofil DS402 bedient.
Als Slave können die kompakten, für Schutzkleinspannung (24 V/48 V DC) ausgelegten Innenläufermotoren jetzt direkt in die flexibel als Stern, Ring oder Linie aufgebaute Ethercat-Topologie eingebunden werden, die bis zu 64.000 Knoten unterstützt. Das schnelle Protokoll ermöglicht dann beispielsweise »Multi-Achs«-Anwendungen wie fliegende Sägen, bei denen es auf höchste Synchronität zwischen Vorschub- und Werkzeugachsen ankommt. Dabei können die Antriebe wahlweise drehzahl-, strom- oder positionsgeregelt betrieben werden. Selbst sicherheitsgerichtete Anwendungen sind realisierbar. Als Option lässt sich dafür eine weitere Platine mit STO-Funktion (Safe Torque Off) integrieren. Bei einem sicherheitsrelevanten Fehler wird die Energieversorgung sofort unterbrochen und der Antrieb gemäß Performance Level d bzw. SIL2 still gesetzt. Für die Sicherheitsfunktion steht ein zusätzlicher Steckeranschluss zur Verfügung.
Praxisgerechte Montage und Diagnoseschnittstelle
Die Montage der Antriebe ist einfach und praxisgerecht. Alle Anschlüsse sind auf einer Seite platziert, was dem Konstrukteur die Arbeit hinsichtlich Kabelführungen deutlich erleichtert. Die eindeutig vorgegebene Anschlussrichtung spart in der Maschine oder Anlage Platz, kann in Sonderfällen und bei größeren Stückzahlen aber auch anwendungsspezifisch angepasst werden. Die Diagnoseschnittstelle der Antriebe bleibt auch im eingebauten Zustand gut zugänglich.
Zwar bietet Ethercat zahlreiche Diagnosemöglichkeiten um im Netzwerk eventuelle Hard- und Softwarefehler zu detektieren. Dennoch kann es sinnvoll sein, für Servicezwecke direkt vor Ort auf den Antrieb zuzugreifen oder auch Bewegungsprofile anzupassen. Gerade das Einstellen der sogenannten Regelparameter direkt am Antrieb bietet hier große Vorteile. Die Diagnoseschnittstelle der ECI-63-Antriebe erlaubt den Zugriff auf relevante Daten bei laufendem Netzwerkbetrieb. So lassen sich beispielsweise der interne Fehlerspeicher auslesen, Stromverläufe und Regelzeiten abfragen und anpassen, Programmabläufe verändern sowie bei Bedarf neu laden, Firmwareupdates erledigen oder das elektronische Datenblatt (EDS) herunterladen. Zudem kann festgelegt werden, welche Informationen der jeweilige Antrieb über das Netzwerk an die übergeordnete SPS oder das Leitsystem übertragen soll.
Modulares Antriebssystem für individuelle Auslegung
Die ECI-Antriebe sind Teil des modularen Antriebssystems von ebm-papst und lassen sich auf Grund der modularen Bauweise innerhalb kurzer Zeit flexibel für die konkrete Aufgabenstellung zusammenstellen, also mit Getrieben, Gebern und Bremsen kombinieren (Bild 4). Insgesamt sind mehrere tausend Varianten möglich; definierte Konfigurationen sind als sogenannte Vorzugstypen innerhalb von nur 48 Stunden versandfertig.
Um das Abtriebsdrehmoment auf das in der Anwendung benötigte Niveau zu erhöhen, stehen verschiedene Getriebemodule zur Verfügung. Neben Planeten- und Stirnradgetrieben sind z. B. auch die platzsparenden Eta-Crown-Winkelgetriebe auf Basis der innovativen Kronenradtechnologie lieferbar. Verlangt die Anwendung Halte- bzw. Sicherheitsbremsen, um beispielsweise bei einer Hubeinrichtung auch bei einem Ausfall der Versorgungsspannung die Position sicher zu halten, können Bremsmodule nach dem Prinzip der Federkraftbremsen die Antriebseinheit ergänzen, teilweise auch als Green-Brake-Ausführung, bei denen die spezielle Beschaltung für einen energieoptimierten Betrieb sorgt. Bei sicherheitsrelevanten Anwendungen können die inkrementalen oder absolut Multiturn-Encodersysteme auch redundant ausgelegt werden. Alle Antriebe erfüllen die Anforderungen der Schutzart IP54, als Option auch IP65.


{kind=link}
{kind=link}
{kind=link}