Auf einen Blick
Reluktanzmotoren haben einen besseren Wirkungsgrad als vergleichbare Asynchronmaschinen
Die Norm schließt unabhängig von ihrer Bemessungsspannung und -frequenz alle Wechselstrom- und Drehstrom-Induktionsmotoren niedriger Spannung sowie permanentmagneterregte Motoren mit Direktanlauf ein. Im Gegensatz zur ersten Ausgabe der IEC 60034-30 gilt die aktuelle Norm für einen Leistungsbereich von 0,12 kW bis 1000 kW. Sie umfasst sämtliche Bauarten elektrischer Motoren mit Direktanlauf und nicht nur Drehstrom-Induktionsmotoren mit Käfigläufer.
Neu aufgenommen in dieser Norm ist die Wirkungsgradklasse IE4. Damit ist die informative Definition von IE4 überholt, die ursprünglich in der IEC 60034-31:2010 enthalten war. Die nächste Wirkungsgradklasse IE5 ist im Detail noch nicht definiert und für die künftige Ausgabe dieser Norm vorgesehen.
Da das Drehmoment und nicht die Leistung die elektromagnetische Ausnutzung und die mechanischen Abmessungen der Motoren bestimmt, steigt die theoretische Leistung von Motoren mit einer bestimmten Drehzahl linear mit der Netzfrequenz, d. h. um 20 % bei einer Frequenzänderung von 50 Hz auf 60 Hz. Die maßgeblichen Verluste von kleinen und mittleren Induktionsmotoren sind die Stromwärmeverluste in der Wicklung, die quadratisch in die Berechnung einfließen (PV = I2·R). Sie bleiben zwischen 50 Hz und 60 Hz im Wesentlichen konstant, solange das Drehmoment beibehalten wird.
Zwar steigen die drehzahlabhängigen Ventilations-, Reibungs- und Eisenverluste (Ummagnetisierungsverluste) mit der Frequenz an, diese spielen jedoch anteilmäßig bei Motoren mit vier und mehr Polen eine untergeordnete Rolle. Diese Verluste steigen bei Änderung von 50 Hz auf 60 Hz weniger stark an als die um 20 % erhöhte Leistung, was zu einem besseren Wirkungsgrad führt. In der Praxis müssen sowohl die 50 Hz als auch die 60 Hz Bemessungsleistungen von Motoren mit einer Drehzahl den Vorgaben aus internationalen und nationalen Normen entsprechen.
Neu aufgenommen in dieser Norm ist die Wirkungsgradklasse IE4. Damit ist die informative Definition von IE4 überholt, die ursprünglich in der IEC 60034-31:2010 enthalten war. Die nächste Wirkungsgradklasse IE5 ist im Detail noch nicht definiert und für die künftige Ausgabe dieser Norm vorgesehen.
Da das Drehmoment und nicht die Leistung die elektromagnetische Ausnutzung und die mechanischen Abmessungen der Motoren bestimmt, steigt die theoretische Leistung von Motoren mit einer bestimmten Drehzahl linear mit der Netzfrequenz, d. h. um 20 % bei einer Frequenzänderung von 50 Hz auf 60 Hz. Die maßgeblichen Verluste von kleinen und mittleren Induktionsmotoren sind die Stromwärmeverluste in der Wicklung, die quadratisch in die Berechnung einfließen (PV = I2·R). Sie bleiben zwischen 50 Hz und 60 Hz im Wesentlichen konstant, solange das Drehmoment beibehalten wird.
Zwar steigen die drehzahlabhängigen Ventilations-, Reibungs- und Eisenverluste (Ummagnetisierungsverluste) mit der Frequenz an, diese spielen jedoch anteilmäßig bei Motoren mit vier und mehr Polen eine untergeordnete Rolle. Diese Verluste steigen bei Änderung von 50 Hz auf 60 Hz weniger stark an als die um 20 % erhöhte Leistung, was zu einem besseren Wirkungsgrad führt. In der Praxis müssen sowohl die 50 Hz als auch die 60 Hz Bemessungsleistungen von Motoren mit einer Drehzahl den Vorgaben aus internationalen und nationalen Normen entsprechen.

Im Vergleich zu 50 Hz ist der Wirkungsgrad von Drehstromsynchronmotoren mit Käfigläufern im Leistungsbereich von 0,75 kW bis 375 kW bei 60 Hz zwischen 0,5 % und 2,5 % größer. Ausnahmen sind ggf. große zweipolige Motoren. Sie können bei 60 Hz aufgrund des hohen Anteils von Eisen-, Lüftungs- und Reibungsverlusten einen kleineren Wirkungsgrad haben.
Aufgrund der erhöhten Trägheit und der Verluste beim Anfahren ist es möglicherweise nicht energieeffizient, für Aussetz- oder Kurzzeitbetrieb Motoren mit hohem Wirkungsgrad zu wählen.
Die in der IEC 60034-30-1 definierten Wirkungsgradklassen sind unabhängig von den Abmessungen (Baugrößen) der Motoren. Es kann der Fall eintreten, dass Motoren mit höheren Wirkungsgradklassen nicht gleichzeitig alle mechanischen Abmessungen der nationalen und regionalen Normen einhalten.
Ein zweiter Teil zu dieser Normenreihe (IEC 60034-30-2) ist in Vorbereitung. Dieser gilt für Motoren, die für eine Versorgung mit variabler Spannung und Frequenz, wie z. B. Synchronmotoren, bemessen sind.
Veränderungen
Gegenüber der DIN EN 60034-30 (VDE 0530-30):2009-08 wurden folgende Änderungen vorgenommen:- Aufteilung in zwei Teile, wobei Teil 1 für alle Bauarten netzgespeister Drehstrommotoren gilt
- Erweiterung des Anwendungsbereiches um Motoren mit Bemessungsleistungen von 0,12 kW bis 1000 kW
- Erweiterung auf 8-polige Maschinen
- Aufnahme von Anforderungen für Wirkungsgradklasse IE4
- Erweiterung der Umgebungstemperatur von – 20 °C bis + 60 °C
- Erweiterung um Motoren, die trotz anderer Betriebsart als S1 bei Bemessungsleistung im Dauerbetrieb betrieben werden können.
Anwendungsbereich
Der Teil 1 gilt für elektrische Motoren die mit sinusförmiger Spannung betrieben werden können und die- für eine Bemessungsleistung 0,12kW ≤ PN ≤ 1 000 kW,
- für eine Bemessungsspannung 50V ≤ UN ≤ 1 kV
- für eine Polzahl von 2 ≤ 2p ≤ 8 und
- für eine Höhe von bis zu 4 000 m über dem Meeresspiegel,
- bei Bemessungsleistung für Dauerbetrieb bei einem Erwärmungsanstieg innerhalb der bemessenen Temperaturklasse,
- für eine Umgebungstemperatur von –20 °C bis + 60 °C ausgelegt sind.
Motoren, die für Temperaturen außerhalb des Bereichs von – 20 °C bis + 60 °C bemessen sind, fallen unter Spezialkonstruktionen und sind daher von dieser Norm ausgenommen. Brandgasmotoren mit einer Temperaturklasse bis 400 °C sind hingegen eingeschlossen.
Ausgeschlossen sind
- Motoren für einer Drehzahl mit zehn oder mehr Polen, sowie Motoren, die für mehrere Drehzahlen ausgelegt sind.
- Motoren mit mechanischer Kommutierung, z. B. Gleichstrommotoren.
- Motoren, die vollständig in eine Maschine integriert sind (z. B. Pumpen, Lüfter und Kompressoren) und praktisch nicht eigenständig geprüft werden können.
- TEAO-Motoren (Totally Enclosed, Air Over), was »geschlossene Motoren« bedeutet, die durch Kühlmittel von außerhalb der Maschine gekühlt werden, sind in dieser Norm ebenfalls enthalten. Die Prüfung des Wirkungsgrads derartiger Motoren hat bei ausgebautem Lüfter zu erfolgen. Für die Kühlung ist ein Fremdlüfter mit einem vergleichbaren Luftdurchsatz wie der ursprüngliche Lüfter zu verwenden.
- Motoren mit integrierten Frequenzumrichtern (Kompaktantriebe), wenn der Motor nicht getrennt vom Umrichter geprüft werden kann. Die Wirkungsgrad-Klassifizierung muss bei Kompaktantrieben basierend auf dem kompletten Antriebssystem (PDS: Power Drive System) erfolgen und wird daher in einer separaten Norm definiert.
- Bremsmotoren, wenn die Bremse integraler Bestandteil der inneren Motorkonstruktion ist und weder entfernt noch während der Prüfung des Motorwirkungsgrads separat betrieben werden kann.
- Unterwassermotoren, die speziell dafür ausgelegt sind, dass sie komplett in Flüssigkeiten eingetaucht betrieben werden können.
- Brandgasmotoren mit einer Temperaturklasse über 400 °C.
Erreichbare Wirkungsgradklassen
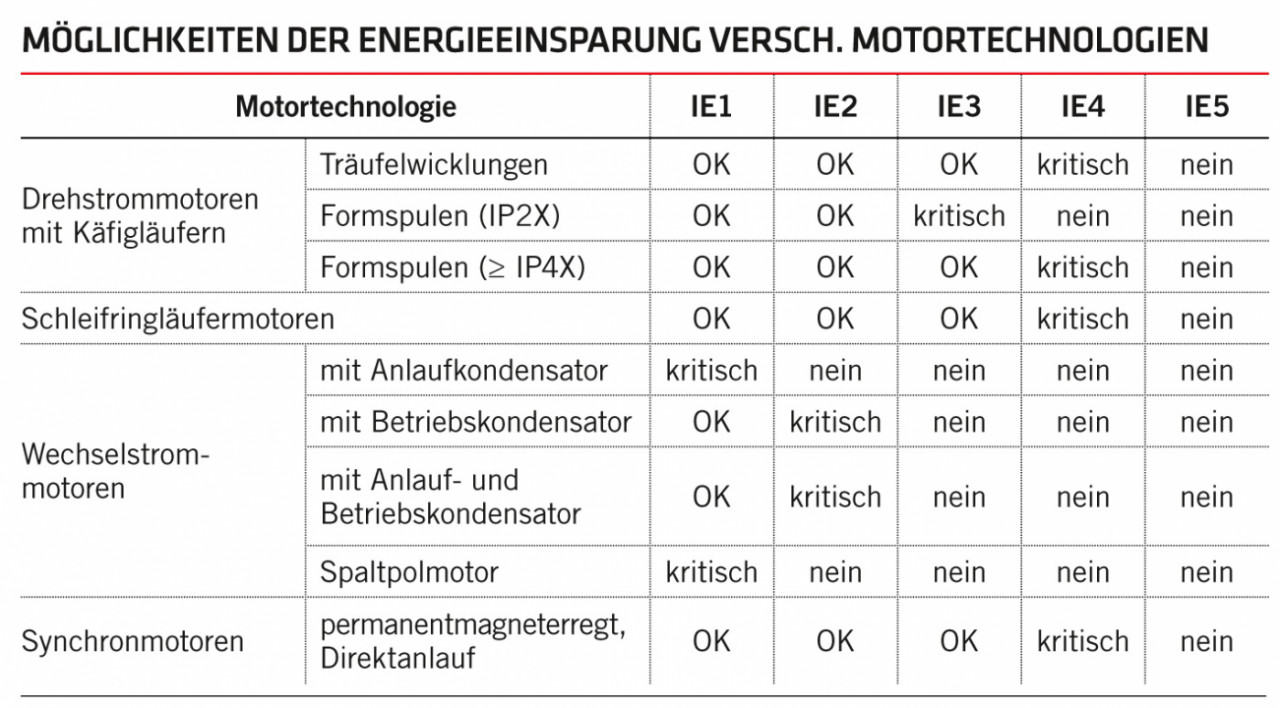
Hinsichtlich der IE-Klassifizierung (Tabelle 1) bedeutet OK, dass Hersteller die Wirkungsgradklasse mit heutiger Technologie erreichen können. Unter Umständen ist dies bei bestimmten Baugrößen unwirtschaftlich. Ein »Nein« bedeutet, dass die Wirkungsgradklasse nach heutigem Stand der Technik nicht möglich ist. Mit »kritisch« ist gemeint, dass sich die Wirkungsgradklasse mit moderner Technologie höchstwahrscheinlich, aber nicht für alle Bemessungen erreichen lassen.
Tabelle 1: Bei der Bestimmung von Mindestwirkungsgraden MEPS (Minimum Energy Efficiency Performance Standards) ist zu berücksichtigen, dass sich nicht alle Motortechnologien in jeder
Wirkungsgradklasse wirtschaftlich herstellen oder betreiben lassen
Angaben der Wirkungsgradklassen
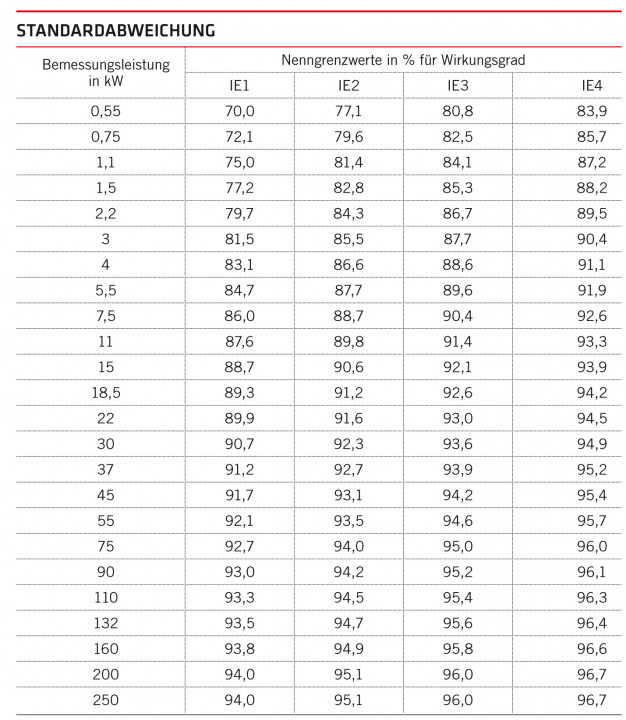
Der Bemessungswirkungsgrad und der IE-Code müssen dauerhaft auf dem Leistungsschild angegeben werden, z. B. »IE2 – 84,0 %«. Tabelle 2 zeigt die Unterschiede der Wirkungsgrade am Beispiel einer 4-poligen Maschine.Die Grenzwerte für die Wirkungsgradklasse IE5 sollen in der nächsten Ausgabe der EN 60034-30 Beachtung finden. Ziel dabei ist, die Verluste gegenüber der Klasse IE4 um weitere 20 % bezogen auf IE4 zu reduzieren. Bislang sind Motortechnologien der Wirkungsgradklasse IE5 nicht ausreichend entwickelt und daher kommerziell auch nicht verfügbar.
Künftige Optimierungsanstrengungen hinsichtlich der Energieeffizienz sollten die Gesamtsysteme während der kompletten Betriebszeit unter Berücksichtigung aller Systemverluste (Umrichter, Filter, Kabel, Motor usw.) und Entsorgung im Fokus haben.
Künftige Optimierungsanstrengungen hinsichtlich der Energieeffizienz sollten die Gesamtsysteme während der kompletten Betriebszeit unter Berücksichtigung aller Systemverluste (Umrichter, Filter, Kabel, Motor usw.) und Entsorgung im Fokus haben.
Antriebe mit Synchron-Reluktanzmotor und FU

Im Gegensatz zu anderen IE4-Motoren mit Permanentmagneten orientieren sich die meisten IE4-Synchron-Reluktanzmotoren an den von Cenelec harmonisierten Kombinationen aus Baugröße und Leistung. Das bedeutet, die Nachrüstung auf die höchste Effizienzstufe ist einfach, ohne mechanische Änderungen möglich, so dass die Amortisierungszeit der Gesamtinvestition sehr kurz ist.
Technologie

Teillastbereich




{kind=link}
{kind=link}
{kind=link}